论文链接<A Distributional Perspective on Reinforcement Learning>
概要
通常情况下,强化学习中的值函数是对状态价值或状态动作价值的期望进行估计,而本文提出了对其分布进行估计的算法,将贝尔曼方程拓展到了基于价值分布的形式。在实际运用中也获得了很好的效果。
算法
Distributional Bellman Equation
标准的贝尔曼方程对价值的期望进行迭代,而本论文中则按照以下公式对价值的分布进行迭代。
\[Z(x, a) =^D R(x, a) +\gamma Z(X', A')\]Z(x, a)是价值分布,这个分布受到回报R,下一个动作状态对$(X’,A’)$以及它关于$X’,A’$的回报分布$Z(X’,A’)$这三个随机变量决定。
Distributional Bellman Operator
根据分布形式的贝尔曼公式,作者给出了策略评估时的算子
\[{\it{T}}^\pi Z(x,a) :=^D R(x,a)+\gamma P^\pi Z(x,a)\] \[P^\pi Z(x,a):=^D Z(X',A') \quad X'\sim P(·|x,a),A' \sim \pi(·|X')\]价值分布的表示
本论文中使用了离散分布来近似价值分布。这个离散分布由$V_{MIN}$到$V_{MAX}$之间N个均匀分布的点的概率组成。数学上可以表示为:
\[Z_\theta(x,a)=z_i \quad w.p.\quad p_i(x,a):=\frac{e^{\theta_i(x,a)}}{\sum_je^{\theta_j(x,a)}}\] \[z_i \in \{z_i = V_{MIN}+i\Delta z:0 \le i \lt N\},\Delta z := \frac{V_{MAX}-V_{MIN}}{N-1}\]$z_i$表示了某一个离散的价值,$p_i(x,a)$表示了该价值的概率。
Projected Bellman Update
对于离散的价值分布,通过算子${\it{T}}^\pi$更新得到的分布${\it{Τ}}^\pi Z_\theta$几乎不会和$Z_\theta$的support有任何交集。因此,作者提出了Projected update的方法,把${\it{T}}^\pi Z(x,a)$的support上的概率分配到相邻的,$Z_\theta$的support上。
\[(\Phi \hat{\it{T}}Z_\theta(x,a))_i=\Sigma^{N-1}_{j=0}[{1-\frac{|[\hat{\it{T}} z_j]^{V_{MAX}}_{V_{MIN}} - z_i|}{\Delta z}}]^1_0 p_j(x',\pi(x'))\]$[·]^a_b$表示把它的参数限制在$[a,b]$之间. $\hat{\it{T}} z_j:=r+\gamma z_j$.
这个式子看起来比较复杂,但表达的意思只是把$Z_\theta$经过算子$\hat{\it{T}}$计算后得到的新分布$\hat{\it{T}} Z_\theta$中每个support对应的概率,分配给与它相邻(即距离小于$\Delta z$)的$Z_\theta$的support上,分配的多少由他们的距离远近决定。
从算法上能更清晰的看出每个新support的概率是如何分配的。
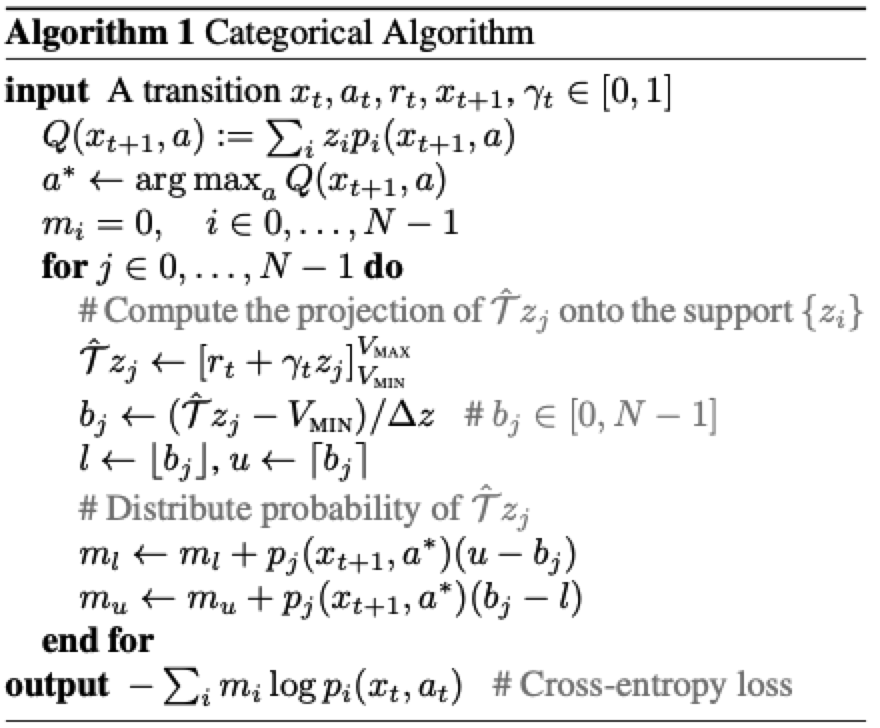
对于新得到的一个support$\hat{\it{T}} z_j$,它左右的邻近support就是$z_l$和$z_u$,而$\hat{\it{T}} z_j$处的概率$p_j(x_{t+1},a*)$则按照$u-b_j$与$b_j-l$这一比例分配给了$z_l$和$z_u$。
最后,在得到更新后的价值分布后,就可以通过最小化新旧分布的交叉熵来更新参数$\theta$了。需要注意的是,在优化时,新分布应当看作由固定参数$\hat\theta$得到的固定分布$\Phi \hat{\it{T}}Z_{\hat\theta}(x,a))$。
核心功能代码
代码实现上相对DQN的区别共有3处。
- 在获取Q值时需要在用各个atom上的概率计算。
- 策略迭代时迭代的是分布而不是一个值
- loss不再是Q与Q_target的MSE而是两个Q分布的交叉熵
Q值计算:
def _dist_to_q(self, dist):
return (
dist
* torch.linspace(
self.V_MIN, self.V_MAX, self.atom_num, device=self.model.device
)
).sum(-1)
Projected Bellman Update:
def _project_distribution(self, next_dist, returns, gammas, done):
batch_size = next_dist.size(0)
delta_z = float(self.V_MAX - self.V_MIN) / (self.atom_num - 1)
support = torch.linspace(
self.V_MIN, self.V_MAX, self.atom_num, device=self.model.device
)
next_dist = next_dist.detach()
returns = returns.unsqueeze(1).expand_as(next_dist)
gammas = gammas.unsqueeze(1).expand_as(next_dist)
support = support.unsqueeze(0).expand_as(next_dist)
done = to_torch_as(done, returns).unsqueeze(1).expand_as(next_dist)
new_support = returns + (1 - done) * gammas * support
new_support = new_support.clamp(min=self.V_MIN, max=self.V_MAX - 1e-4)
b = (new_support - self.V_MIN) / delta_z
l = b.floor().long()
u = l + 1
offset = (
torch.linspace(
0,
(batch_size - 1) * self.atom_num,
batch_size,
device=self.model.device,
)
.long()
.unsqueeze(1)
.expand(batch_size, self.atom_num)
)
proj_dist = torch.zeros(next_dist.size(), device=self.model.device)
proj_dist.view(-1).index_add_(
0, (l + offset).view(-1), (next_dist * (u.float() - b)).view(-1)
)
proj_dist.view(-1).index_add_(
0, (u + offset).view(-1), (next_dist * (b - l.float())).view(-1)
)
return proj_dist
loss计算:
loss = -(new_dist * q_dist.log()).sum(1) #axis0是batch纬度